




















Steuerung von XY & XYZ Mehrachsrobotern
- Flexible Kombinationsanwendungen ermöglichen die lineare Bewegung von Ein-Achs-Robotern und die Realisierung von 2D- und 3D-Mehrachs-Bewegungsfunktionen.
- Vielfältige Kombinationen von Modulen bieten dem Kunden schnell aufgebaute Anlagen in unterschiedlichen Umgebungen.
- Durch die Ausstattung der 3-Achesen PTP Servo Controller haben Sie die Möglichkeit, ohne das für Sie Kosten für Eintwicklung der Softaware anfallen, die Schnittstelle zwischen Mensch & Maschine zu bekommen, sodass Sie bei uns alles aus einer Hand bekommen.
- MoCAT 3-Achs-Steuerung ist mit der EtherCAT High-Speed-Kommunikation sDXFServo / AC / Servomotor-Serie ausgestattet.
1. EtherCAT-Steuerung
|
Bewegungssteuerung
|
 |
Konfiguration der Adapterkarte

Hardware-Architektur
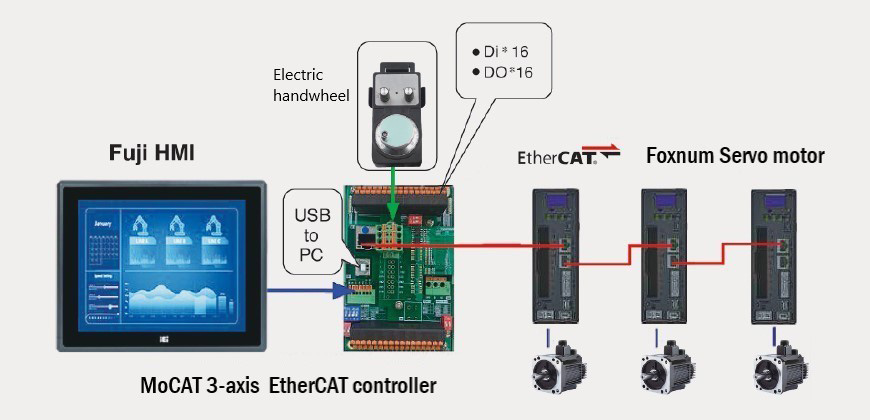
3-Achsen-Steuerung
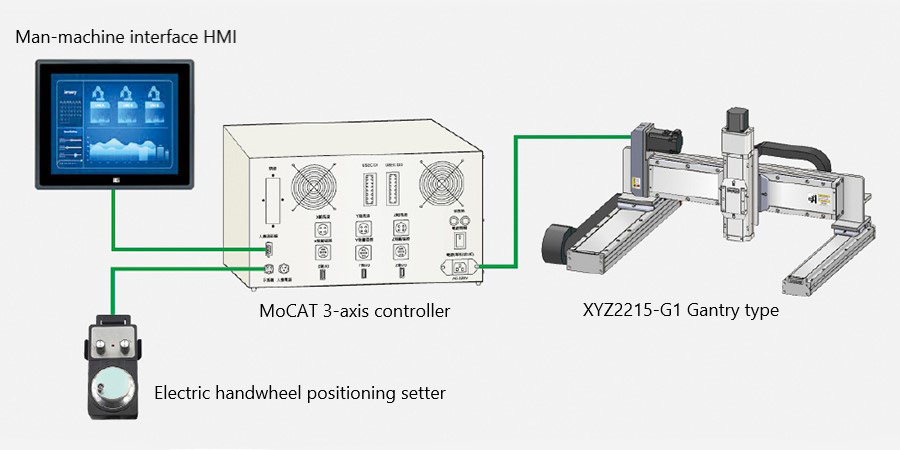
3-Achsen-Roboter
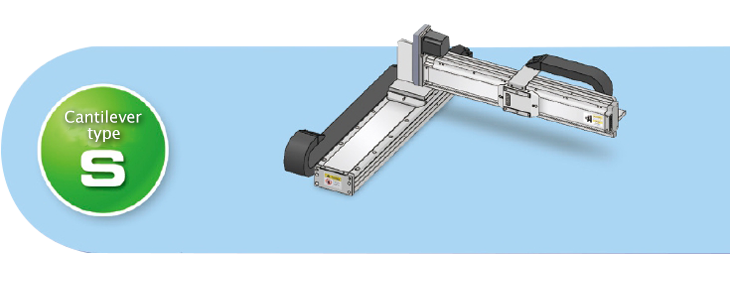 "Die Y-Achse treibt die X-Achse an, und die X-Achse trägt das Werkstück. " |
 Die Y-Achse treibt die Z-Achse an, und die Z-Achse trägt das Werkstück. |
 "Die Y-Achse treibt die X-Achse an, und die X-Achse treibt die Z-Achse an, um das Werkstück zu tragen, die Hilfsachse stützt sich an der Seite ab. " |
 Die X-Achse treibt die Z-Achse waagerecht an, und die Z-Achse trägt das Werkstück. |
1. Hohe Leistung

Automatische Einstellung 

Automatische Anpassung der Parameter für bestimmte mechanische Strukturen zur Optimierung der Systemleistung.
Vibrationsunterdrückung
Bietet 4 Sätze von Kerbfiltern sowie Dämpfungs- und Schwingungsreduzierungsfunktionen.
Mit nur einer Taste können mechanische Vibrationen automatisch erkannt und unterdrückt sowie Überschwingungen und Einschwingzeiten verkürzt werden.
Es gibt auch eine Befehlsfilterfunktion, die die Frequenz, die die Vibration des Endes verursacht, vom Befehlsende entfernt.
Zwei-Grad-Freiheitsgrad-Vorsteuerung
Die unabhängige Vorsteuerung von Drehzahl und Drehmoment verbessert die Positionsabweichung, so dass es keine Hysterese zwischen der Ausgangsreaktion des Systems und dem Eingangsbefehl gibt.
Feininterpolation der Befehle
Verbessert die Präzision der Positionssteuerung und sorgt für einen gleichmäßigeren Motorlauf.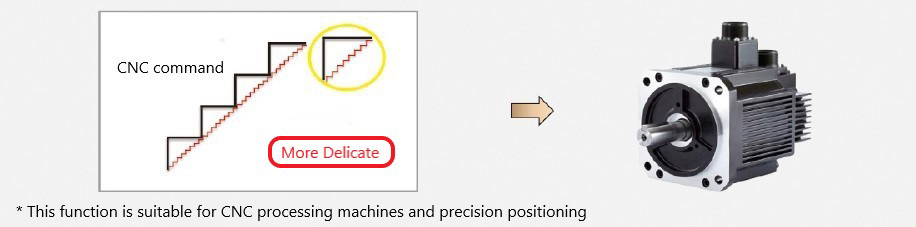
Reibungskompensation
Kompensiert die Reibungsveränderung bei Richtungsänderungen der Plattform und optimiert den scharfen Winkelfehler des Wendepunkts der Funktion.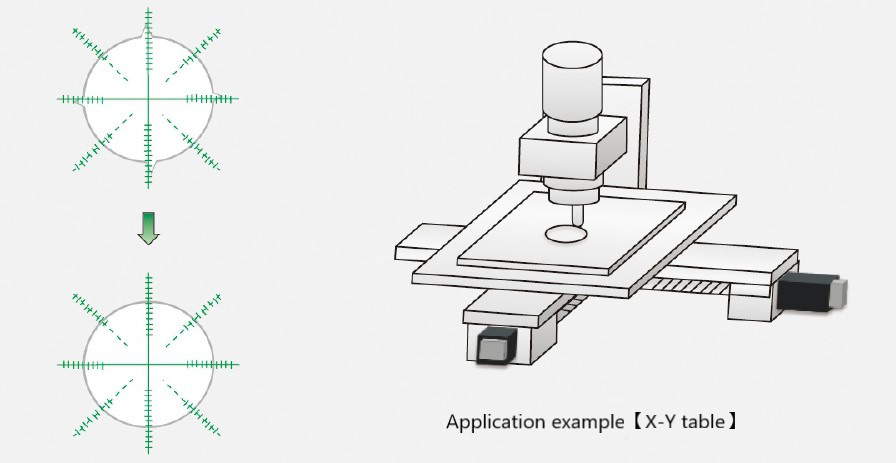
2. Multifunktional
Position/speedometer
Die Mehrpunktregelung kann erreicht werden, ohne dass der Regler Impulse sendet, was die Kosten für die Verwendung des Impulsmoduls spart. Es kann für Multidrehzahlregelungen verwendet werden und kann auch mit Reglern verschiedener Marken verwendet werden.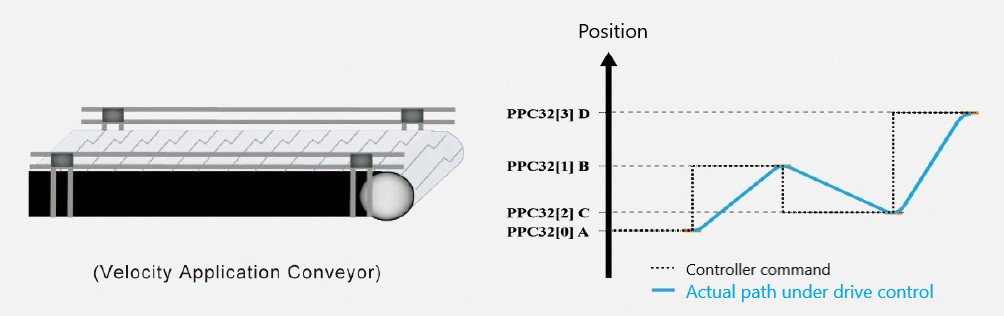
Positionsregelung im geschlossenen Regelkreis
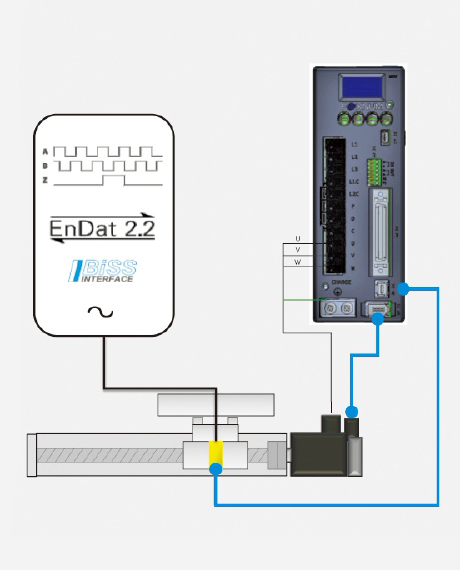
* Um den Encoder zu unterstützen, müssen Sie das entsprechende Treibermodell auswählen.
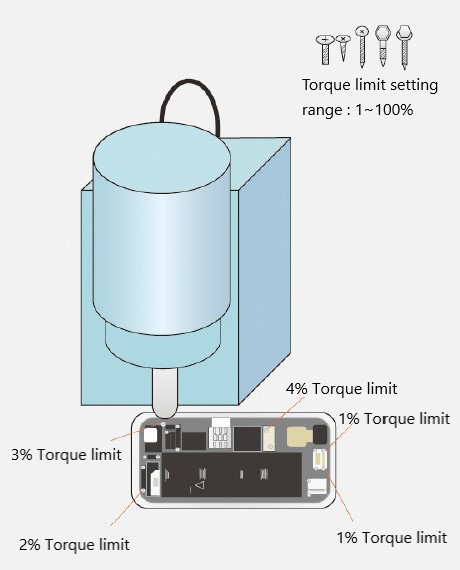
Digital torque limit
3. Flexibel
Kompatibel mit verschiedenen Motorentypen
Es kann mit verschiedenen Motortypen verwendet werden, wie z.B. Permanentmagnet-Synchronmotoren, Linearmotoren, Direktantriebsmotoren, Induktionsmotoren. Realisieren Sie eine präzise Steuerung von Position, Geschwindigkeit und Drehmoment und unterstützen Sie verschiedene Anwendungen mit einem einzigen Gerät.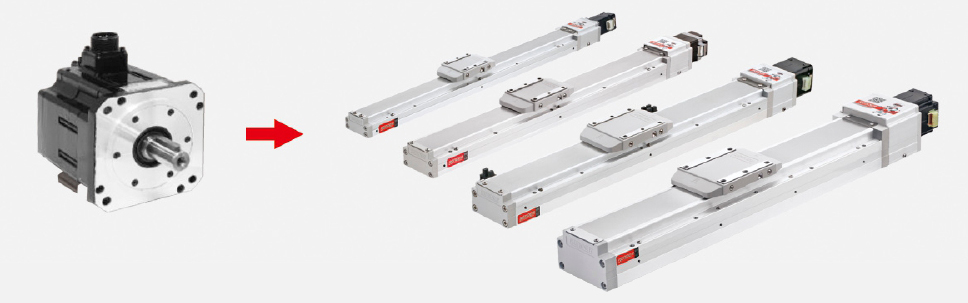
4. Weithin anwendbar
Weit verbreitet in Ausrüstungen der Automatisierungsindustrie, CNC-Bearbeitungsmaschinen und spezifischen Maschinenausrüstungen.
Die FOXNUM-Servo-Treiber (Pulse) Serie kann digitale IO bis zu 31 Gruppen von programmierbaren Planung erweitern. Die Anzahl der steuerbaren Werkzeuge hängt von den verschiedenen Steuerungseinstellungen ab, es können bis zu 62 Werkzeuge gesteuert werden.

 |
 |
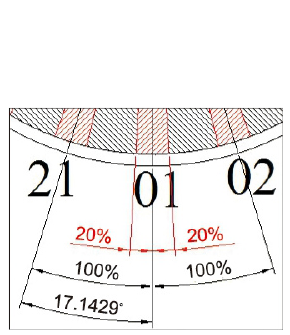 |
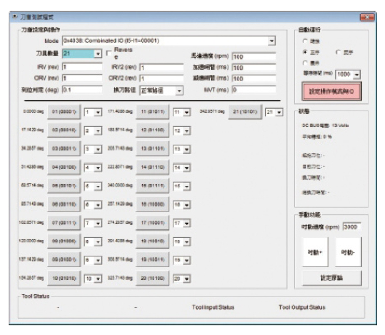
| Digitaler IO-Steuerungsmodus Er kann für die präzise Mehrpunkt-Positionierung eingesetzt werden, wie z.B. Vier-Achsen, Werkzeugmagazin, Indexierungsplatte. Bei der Ein-Achsen-Mehrpunkt-Positionierung oder bei Funktionen mit festem Hub oder Winkelindexierung kann dieser Modus die Verwendung von Motion-Control-Karten oder Impulsmodulen einsparen. |
Kompensation der Werkzeugposition "Schreiben Sie den Indexierungswinkel der Maschinenposition über den Treiber in den Encoder, so dass das Werkzeugmagazin die Indexierungsgruppen der Maschinenposition nach der Montage und Kalibrierung sofort im Encoder speichert. So muss nach dem Austausch des Treibers die Position nicht neu kalibriert und die Indexierungsposition der Maschine neu eingestellt werden. " |
Automatische Korrektur des Versatzes Zulässiger Bereich für den automatischen Korrekturbetrieb. |
5. Das Internet
Bussteuerung
Unterstützt EtherCAT-Kommunikation. Schnelle, einfache Verdrahtung, kann für entfernte oder verteilte Steuerungsanforderungen angewendet werden (in Übereinstimmung mit CoE)
Hochauflösender LCM-Display-Betrieb
Zweifrequenz-Informationsüberwachung, mit der Befehle und Rückmeldungen gleichzeitig überwacht werden können. Was die Flexibilität bei der Fehlersuche in Echtzeit verbessert und das System benutzerfreundlicher und Benutzerfreundlicher macht.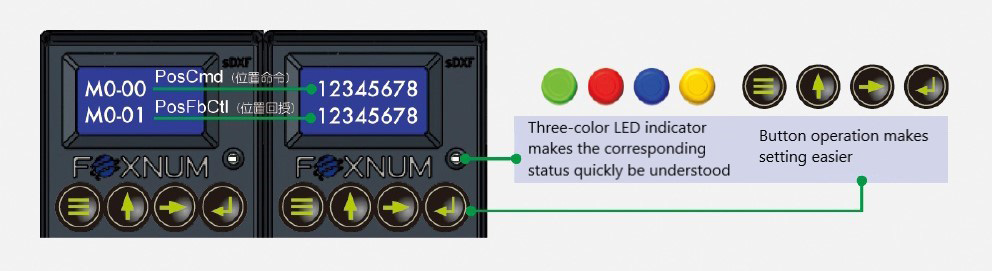
Mensch-Maschine-Schnittstelle
Grafische ansprechende Seiten helfen dem Kunden, sich schnell mit der Software vertraut zu machen, Parameter einzustellen, den Status des Treibers zu überwachen, Leistungsanpassungen vorzunehmen und Funktionen automatisch zu adaptieren.
2. Servo-Treiber der Serie sDXF
sDXF(Pulse) Automatisierungsgeräte
Das Allzweck-Servosystem ist für verschiedene Automatisierungsanlagen geeignet. Es kann mit der übergeordneten Steuerung verschiedener Marken verwendet werden und findet Anwendung in Geräten wie Werkzeugmagazinen, automatisierten Produktionslinien, Schraubensicherungsmaschinen und Handhabungsrobotern. Es kann auch eine Vielzahl von Encoder-Feedback-Schnittstellen und vollständig geschlossene Regelkreise unterstützen. (Hinweis: Um den Encoder zu unterstützen, müssen Sie das entsprechende Treibermodell auswählen)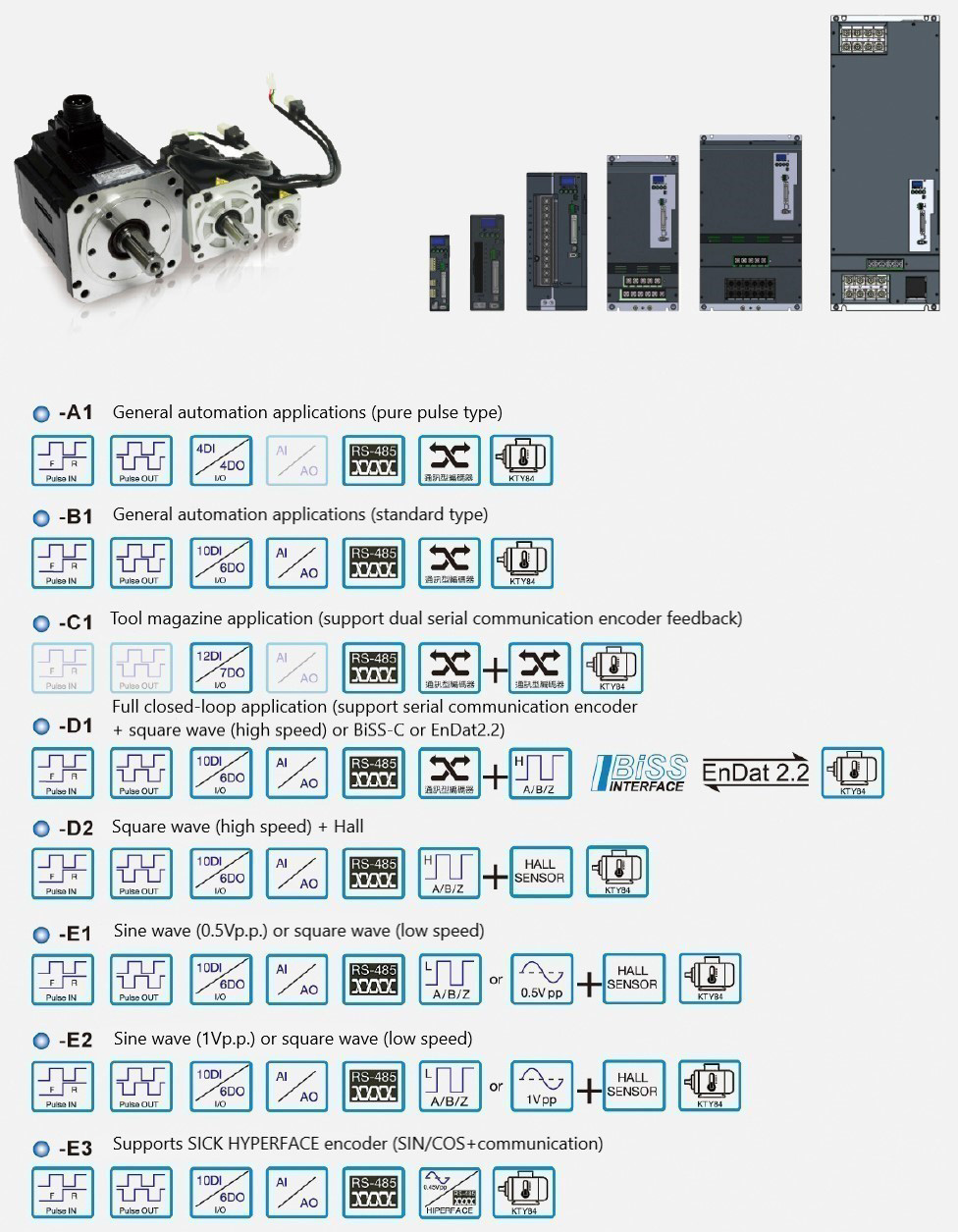
sDXF(Pulse)-CNC/Werkzeugmaschine
Das Bus-Servosystem kann die Zykluszeit der synchronen Kommunikation verkürzen und verfügt über eine fortschrittliche Servoverstärkungseinstellung und mehrere Funktionen, um eine hochpräzise und mehrachsige Simultansteuerung zu realisieren und die Anforderungen von CNC, mehreren Achsen oder hoher Simultanleistung für Maschinen und Anlagen zu erfüllen. (Hinweis: Um den Encoder zu unterstützen, müssen Sie das entsprechende Treibermodell auswählen)